Superstructure Function Documentation#
- Author:
Christopher Laliwala, Oluwamayowa O. Amusat, Ana I. Torres
- Date:
October 2025
Overview#
This function employs superstructure optimization to identify optimal processing pathways for recovering materials from end-of-life products. The framework assumes discrete operations for first-stage disassembly and continuous operations for subsequent processing stages. Applications are demonstrated in [EVLaliwala2024] and [HDDLaliwala2024]. Users can optionally consider byproduct valorization and environmental impacts in their pathway selection.
Building Superstructure Model#
The build_model() function constructs a Pyomo superstructure optimization model that identifies
optimal processing pathways for recovering materials from end-of-life products. The function performs
validation on all inputs, builds the mathematical model with appropriate variables and constraints,
and returns a ConcreteModel ready for optimization.
Function Arguments#
The arguments that must be passed to build the superstructure model are shown below:
Argument |
Type |
Description |
|---|---|---|
Objective Function |
||
|
ObjectiveFunctionChoice |
Choice of objective function. Options are |
Plant Lifetime Parameters |
||
|
int |
The year that plant construction begins. |
|
int |
The total lifetime of the plant, including plant construction. Must be at least three years. |
Feed Parameters |
||
|
dict |
Total feedstock available (number of EOL products) for recycling each year. |
|
float |
Collection rate for how much available feed is processed by the plant each year. |
|
list |
List of tracked components. |
|
dict |
Mass of tracked components per EOL product (kg / EOL product). |
Superstructure Formulation Parameters |
||
|
int |
Number of total stages. |
|
dict |
Number of options in each stage. |
|
dict |
Set of options k’ in stage j+1 connected to option k in stage j. |
|
dict |
Tracked component retention efficiency for each option. |
Operating Parameters |
||
|
dict |
Profit per unit of product in terms of tracked components ($/kg tracked component). |
|
dict |
Variable operating cost parameters for options that are continuous. Variable operating costs assumed to be proportional to the feed entering the option. |
|
dict |
Number of operators needed per discrete unit for options that utilize discrete units. |
|
dict |
Yearly operating costs per unit ($/year) for options which utilize discrete units. |
|
dict |
Cost per unit ($) for options which utilize discrete units. |
|
dict |
Processing rate per unit for options that utilize discrete units. In terms of end-of-life products disassembled per year per unit (number of EOL products / year). |
|
dict |
Number of operators needed for each continuous option. |
|
float |
Yearly wage per operator ($ / year). |
Discretized Costing Parameters |
||
|
dict |
Discretized cost by flows entering for each continuous option ($/kg). |
Environmental Impacts Parameters |
||
|
bool |
Choice of whether or not to consider environmental impacts. |
|
dict |
Environmental impacts matrix. Unit chosen indicator per unit of incoming flowrate. |
|
float |
Epsilon factor for generating the Pareto front. |
Byproduct Valorization Parameters |
||
|
bool |
Decide whether or not to consider the valorization of byproducts. |
|
dict |
Byproducts considered, and their value ($/kg). |
|
dict |
Conversion factors for each byproduct for each option. |
If NPV maximization is chosen, a mixed-integer linear programming model is constructed (MILP), if COR minimization is chosen, a mixed-integer quadratically constrained programming model is constructed (MIQCP). It is recommended that the user install Gurobi, as this solver can deal with both formulations, and also can deal with the SOS2 constraints that are generated for the piecewise-linear constraints.
Default Costing Parameters#
The following table shows the default costing parameters used in the superstructure model. These values are based on NETL’s Quality Guidelines for Energy System Studies (QGESS) [Theis2021] and economic assumptions from Keim et al. (2019) [Keim2019]. All parameters are mutable and can be modified by the user after model creation.
Parameter |
Description |
Default Value |
|---|---|---|
|
Lang factor for calculating total plant cost from equipment costs. |
2.97 |
|
Operating expenses escalation rate. |
0.03 (3%) |
|
Capital expenses escalation rate. |
0.036 (3.6%) |
|
Discount factor for calculating the net present value. The after-tax weighted average cost of capital (ATWACC) is used. |
0.0577 (5.77%) |
|
Factor for calculating financing costs from total plant cost. |
0.027 (2.7%) |
|
Factor for calculating ‘other costs’ as defined by QGESS from the total plant cost. |
0.15 (15%) |
|
Factor for calculating Maintenance & Supply Materials as a percentage of total plant cost. |
0.02 (2%) |
|
Factor for calculating Sample Analysis & Quality Assurance/Quality Control as a percentage of cost of labor. |
0.1 (10%) |
|
Factor for calculating Sales, Intellectual Property, and Research & Development as a percentage of total profit. |
0.01 (1%) |
|
Factor for calculating Administrative & Supporting Labor as a percentage of cost of labor. |
0.2 (20%) |
|
Factor for calculating Fringe Benefits as a percentage of cost of labor. |
0.25 (25%) |
|
Factor for calculating Property Taxes & Insurance as a percentage of total plant cost. |
0.01 (1%) |
|
Fraction of total overnight capital expended in each year. 10% in year 1, 60% in year 2, and 30% in year 3. |
Year 1: 0.1, Year 2: 0.6, Year 3: 0.3 |
|
Factor for calculating plant overhead as a percentage of total operating costs each year. |
0.2 (20%) |
Viewing Results#
After building and solving the superstructure model, results can be reported to the console
using the reporting functions in the prommis.superstructure.report_superstructure_results
module. These functions provide detailed information about the optimal pathway selected,
economic metrics, and environmental impacts.
The following reporting functions are available:
report_optimal_pathway: Displays the selected processing options for each stage
report_economics: Shows NPV, CAPEX, OPEX, and revenue breakdown
report_material_flows: Reports component flows through the superstructure
report_superstructure_environmental_impacts: Reports yearly and total environmental impacts generated by the process
Example usage:
from prommis.superstructure.report_superstructure_results import report_optimal_pathway
# After solving the model
report_optimal_pathway(model, results)
For detailed documentation of all reporting functions, see the Class Documentation section below.
Model Formulation#
Mass Balance Equations#
The superstructure is modeled as a network where the arrows represent flows and the boxes, or ‘nodes’, represent potential processing options (technologies). As depicted, these technologies are organized in stages.
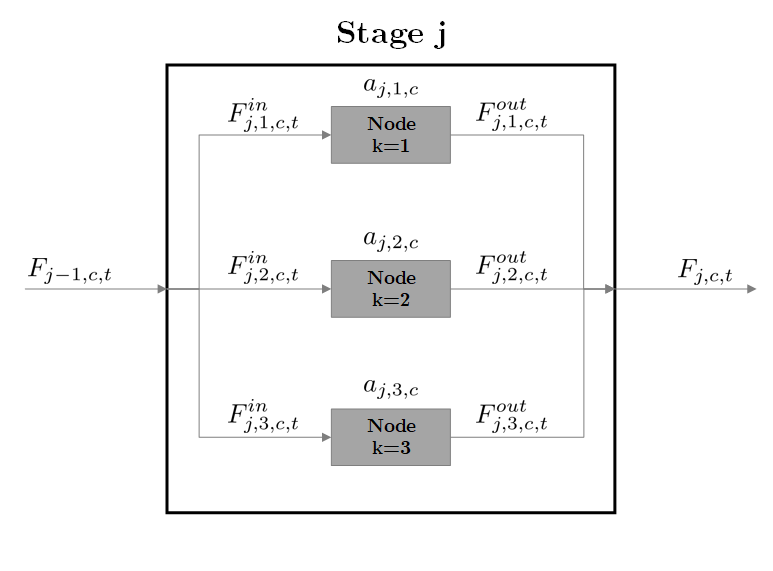
Fig. 3 Generic Mass Balance Diagram#
Fig. 3 illustrates the mass balances for a generic stage \(j\). In this diagram, \(F_{j-1,c,t}\) is the upstream flow of component \(c\) coming from the previous stage \(j-1\) in year \(t\). \(F^{in}_{j,k,c,t}\) represents the inlet stream of component \(c\) entering node \(k\) in stage \(j\) at time \(t\). The sum of the inlet streams \(F^{in}_{j,k,c,t}\) is equal to the upstream flow, \(F_{j-1,c,t}\), as depicted in (1):
However, for the first stage, \(j=1\), the number of EOL products the plant processes in year \(t\) is represented by \(P^{entering}_{prod,t}\). Thus, the sum of the inlet streams \(F^{in}_{j,k,c,t}\) in the initial stage is equal to the flow of EOL product entering the plant. This is depicted in (2):
where \(X_{prod,c,t}\) is the amount of component \(c\) per EOL product in year \(t\).
Referring back to Fig. 3, \(F^{out}_{j,k,c,t}\) is the outlet stream of component \(c\) exiting node \(k\) in stage \(j\) at time \(t\) and is related to the inlet \(F^{in}_{j,k,c,t}\) by the efficiency parameter \(a_{j,k,c}\), as shown in (3):
where the efficiency parameter \(a_{j,k,c}\) represents the percentage of component \(c\) that is retained in node \(k\) in stage \(j\), and thus varies from 0 to 1.
Finally, the variable \(F_{j,c,t}\) represents the flow of component \(c\) exiting stage \(j\) at time \(t\), and is the sum of the outlet streams \(F^{out}_{j,k,c,t}\), as shown in (4).
Logical Constraints#
To ensure that only one optimal pathway is chosen, logical constraints are formulated. We define the binary variables \(y_{j,k}\) for each node, which indicates whether node \(k\) in stage \(j\) is selected. Only one node per stage may be chosen ((5)). It is worth noting here that all stages include a blank node that allows the stage to be bypassed.
Additionally, not all nodes are connected. Therefore, if a node in stage \(j \neq j_{final}\) is selected, a connected node must be chosen in the next stage. This is implemented in (6),
where \(k'\) is an alias for \(k\), and \(K(j,k)\) is the set of nodes in stage \(j+1\) that are connected to the node \(k\) in stage \(j\).
Finally, Big-M constraints are formulated to ensure that nodes that are not chosen have no flow through them ((7) and (8)).
Where \(M_{j,k,c,t}\) and \(M^{out}_{j,k,c,t}\) represent the upper bound of the flowrate.
Cost Equations#
Capital Expenses#
For the capital expenses, the methodology presented in NETL’s Quality Guidelines for Energy System Studies (QGESS) [Theis2021] is followed. However, since the methodology was developed for power plants, modifications to match the economic assumptions in Keim et al. (2019) [Keim2019] are made. It is important to note that all costing parameters (i.e. Lang Factor, financing, etc.) are all mutable parameters that can be changed by the user from their default values. Others, such as the product price \(Price_c\), must be provided by the user.
The capital cost levels from QGESS up until the Total Overnight Cost (\(TOC\)) are shown in Table 7. To calculate the \(TOC\), the total cost of purchased equipment is first calculated for each process node in the superstructure. Piecewise linear approximations are used for scaling equipment costs as functions of equipment size for all stages except disassembly, where discrete values are required. Next, the Total Plant Cost (\(TPC\)) is calculated by multiplying the updated total cost of purchased equipment by a Lang Factor (\(LF\)) [Keim2019] for each process node in all stages besides the disassembly stages and then summing them. For nodes in the disassembly stage, no Lang Factor is used. Thus, the TPC is computed as:
where \(C_{P,j,k}\) is the total cost of purchased equipment for node \(k\) in stage \(j\).
The \(TOC\) is calculated by (10):
where \(financing\) and \(other \: costs\) are 2.7% and 15% of the TPC, respectively [Theis2021].
Capital Cost Level |
Includes: |
|---|---|
BEC |
Process equipment, Supporting facilities, Direct and indirect labor |
EPCC |
BEC and EPC contractor services |
TPC |
EPCC and Process contingency and Project contingency |
TOC |
TPC and Financing costs and Other owner’s costs |
Operating Expenses (OPEX)#
Both fixed and variable costs are considered for operating expenses. The variable operating costs account for utilities, reagents, and waste disposal and are assumed to be linearly related to the size of the process:
where \(A_{j,k}\) and \(B_{j,k}\) are the linear parameters for option \(k\) in stage \(j\), and \(F^{in,total}_{j,k,t}\) is the total flow entering the option.
For fixed operating costs, the cost of labor, maintenance and supply materials, quality assurance/quality control (QA/QC), sales, IP, R&D, administration and supporting labor, and property taxes and insurance were considered. To calculate the cost of labor (\(COL\)), we adopt the methodology described in Ulrich et al. (2004) [Ulrich2004], which assigns a number of operators to the different units. Other fixed costs are summarized in Table 8. \(R_t\) is the revenue in year \(t\).
Category |
Value |
|---|---|
Maintenance and Supply Materials (M&SM) |
\(0.02 \cdot TPC\) |
Sample Analysis & QA/QC (SA&QA/QC) |
\(0.1 \cdot COL\) |
Sales, IP, and R&D Costs (S,IP,R&D) in year \(t\) |
\(0.01 \cdot R_t\) |
Administrative & Supporting Labor (A&SL) |
\(0.2 \cdot COL\) |
Fringe benefits (FB) |
\(0.25 \cdot COL\) |
Property Taxes & Insurance (PT&I) |
\(0.01 \cdot TPC\) |
Cost of Labor#
To calculate the cost of labor, the user must provide the yearly wage per operator, and the number of operators needed for each option. It is assumed that the plant operates for 8000 hours per year [Seider2017]. For the hourly wage per worker, we refer the user to [BLS2024], and for estimating the number of workers needed per option we refer them to [Ulrich2004] (in this methodology, the number of workers needed is independent of equipment sizing).
Since [Ulrich2004] methodology allows for fractions of workers (since workers can be responsible for multiple parts of a process), the following methodology is followed to calculate the total number of workers needed as an integer. First, the number of workers needed \(workers_{j,k}\), in fractional form for all stages besides the disassembly stage can be calculated using:
For nodes in the disassembly stage, either workers are employed or discrete units are utilized. Thus, the number of workers needed is dependent on the number of workers employed/units utilized for disassembly. The calculation for the number of workers needed, in fractional form, for all nodes in the disassembly stage is shown in (12):
Where \(W^{dis}_{j,k}\) is the number of workers needed per disassembly unit/employee. \(y^{dis \: units}_{j,k,i}\) is a binary variable representing how many workers \(i\) are chosen for node \(k\) in the disassembly stage \(j_{dis}\), and \(max \: dis_{j,k}\) is a parameter representing the maximum number of units/workers for node k in the disassembly stage \(j_{dis}\) that could be utilized/employed.
For the disassembly nodes that employ workers instead of machinery, \(W_{j=1,k}\) is equal to one, as the number of workers needed is equal to the number employed for disassembly. To calculate the total number of workers employed as a whole number, (13) is utilized:
Where \(y^{workers}_{i}\) is a binary variable representing how many total workers \(i\) are employed in the plant, and \(max \: workers\) is a parameter representing the maximum number of workers that can be employed.
To ensure only a single number of workers is employed, (14) is formulated:
Finally, the cost of labor, \(COL\), is calculated using (15):
Where \(wage\) is the yearly wage per worker.
Revenues#
The revenue in a given year \(t\) is calculated by multiplying the flow of each product leaving the final stage by its corresponding price, \(Price_c\) as shown in (16) [Keim2019].
Objective Functions#
Two objectives are available for users: maximizing the net present value (NPV), and minimizing the cost of recovery (COR), which estimates the selling price at which the NPV is zero.
Net Present Value#
The NPV is given by:
Where \(CF_t\) is the cash flow in year \(t\), and \(IR\) is the interest rate. The cash flow was calculated using the methodology discussed in Seider et al. (2017) [Seider2017]. We modify the methodology to account for the assumptions for capital expenditure (\(TOC^{exp}_t\)), capital escalation (\(i^{esc,CAPEX}\)), and revenue and operating costs escalation (\(i^{esc,sales,OPEX}\)) [Keim2019]. The modified equation is shown in (18).
where \(t_{start}\) is the year when the plant begins construction, \(t_{prod \: start}\) is the year when the plant begins production, and \(R_t\) and \(OPEX_t\) are the revenue and operating expenses in year \(t\), respectively. It was assumed that the capital costs would be spread over the first three years, with the expenditure being 10% in the first year, 60% in the second year, and 30% in the third year [Keim2019].
The NPV maximization problem is a mixed-integer linear optimization (MILP) problem.
Cost of Recovery#
The COR is defined as the price of the product ($/kg) required for the NPV to break even. To introduce COR in the optimization problem, we modify the revenue expression ((16)),
convert the NPV equation in (17) into a constraint, and set it to zero.
(19) is non-linear, making the COR minimization a mixed-integer non-linear optimization (MINLP) problem.
Disassembly Stage#
Since the disassembly stage utilizes discrete units, calculation of CAPEX and OPEX is different. First, the number of units utilized, or workers employed (depending on which option is chosen), is calculated such that the flow of incoming EOL products entering the plant can be disassembled without hold-up, as depicted in (21):
Where \(Dis \: Rate_{j,k}\) is a parameter representing the rate of disassembly of the EOL product per unit/worker for node \(k\) in the disassembly stage \(j=1\) and must be provided by the user, \(y^{dis \: units}_{j,k,i}\) is a binary variable representing how many workers, \(i\), are chosen for node \(k\) in the disassembly stage \(j=1\), and \(max \: dis_{j,k}\) is a parameter representing the maximum number of units/workers for node \(k\) in the disassembly stage \(j=1\) that could be utilized/employed.
To ensure only a single number of units/workers is utilized/employed, (22) is formulated:
Finally, to ensure no workers are utilized/employed if a disassembly node is not chosen, (23) is formulated:
CAPEX#
For the nodes that employ workers, the CAPEX is zero. For the nodes that utilize discrete units, (24) is formulated:
Where \(CU_{j,k}\) is a parameter representing the cost per unit for node \(k\) in the disassembly stage \(j=1\). The cost per unit for the disassembly nodes utilizing equipment for disassembly must be provided by the user.
Variable operating costs#
To calculate the variable operating costs, \(OC^{var}_{j,k}\) for all nodes in the disassembly stage, (25) is utilized:
Where \(YCU_{j,k}\) is the yearly cost per unit for node \(k\) in stage \(j\). These values must be provided by the user.
Consideration of Byproduct Valorization#
An additional capability of this function is for users to consider the valorization of byproducts into the overall economics of the process. If the user opts to include this, then a dict containing the byproducts considered and their value ($/kg) must be passed, along with a dict containing the conversion factors of the incoming total flowrate entering for each byproduct produced by each option.
The total amount of each byproduct produced each year is calculated:
where \(F_{b,t}\) is the amount of byproduct \(b\) produced in year \(t\), \(F_{opt,t}^{in, total}\) is the total flow entering the option, \(\alpha_{opt,b}\) is the conversion factor for producing byproduct \(b\) in option \(opt\), \(b(opt)\) is the set of options that produce byproduct \(b\), and \(BP\) is the set of all byproducts.
The yearly profit from byproducts is calculated:
where \(Value_b\) is the value of byproduct \(b\) in $/kg.
When byproduct valorization is considered, the calculation of the revenue is modified differently depending on which objective function is chosen. If the NPV is chosen, the revenue is calculated as:
and if the COR is chosen as the objective the revenue is calculated as:
Consideration of Environmental Impacts#
The user also has the ability to consider environmental impacts of the potential processes. The choice of which environmental impacts is left up to the user. Typically, midpoint indicators are utilized to quantify environmental impacts. A common midpoint indicator tool for quantifying environmental impacts is the EPA’s Tool for the Reduction and Assessment of Chemical and Other Environmental Impacts (TRACI) [TRACI].
The total environmental impacts generated can be calculated by summing the impacts generated by each option over the lifetime of the plant:
where \(EI\) is the environmental impact chosen by the user, \(OPTS\) is the set of all options in the superstructure, and \(\theta_{opt}\) is a parameter for the amount of emissions generated by option \(opt\) per incoming feed entering and must be provided by the user, and \(F^{in,total}_{opt,t}\) is the flowrate entering option \(opt\) in year \(t\).
Consideration of environmental impacts leads to the formation of a multi-criteria optimization problem. This function utilizes the \(\epsilon\)-constraint method. By calling the function for varying values of \(\epsilon\), the user can construct the Pareto front.
Class Documentation#
ObjectiveFunctionChoice#
Superstructure Function#
Superstructure Code#
Author: Chris Laliwala
- class prommis.superstructure.superstructure_function.SuperstructureScaler(**kwargs)[source]#
Bases:
CustomScalerBase- zero_tolerance
Value at which a variable will be considered equal to zero for scaling.
- max_variable_scaling_factor
Maximum value for variable scaling factors.
- min_variable_scaling_factor
Minimum value for variable scaling factors.
- max_constraint_scaling_factor
Maximum value for constraint scaling factors.
- min_constraint_scaling_factor
Minimum value for constraint scaling factors.
- max_expression_scaling_hint
Maximum value for expression scaling hints.
- min_expression_scaling_hint
Minimum value for constraint scaling hints.
- overwrite
Whether to overwrite existing scaling factors.
- constraint_scaling_routine(model, overwrite: bool = False, submodel_scalers: dict = None)[source]#
Routine to apply scaling factors to constraints in model.
Derived classes must overload this method.
- Parameters:
model – model to be scaled
overwrite – whether to overwrite existing scaling factors
submodel_scalers – ComponentMap of Scalers to use for sub-models
- Returns:
None
- variable_scaling_routine(model, overwrite: bool = False, submodel_scalers: dict = None)[source]#
Routine to apply scaling factors to variables in model.
Derived classes must overload this method.
- Parameters:
model – model to be scaled
overwrite – whether to overwrite existing scaling factors
submodel_scalers – ComponentMap of Scalers to use for sub-models
- Returns:
None
- prommis.superstructure.superstructure_function.build_model(obj_func, plant_start, plant_lifetime, available_feed, collection_rate, tracked_comps, prod_comp_mass, num_stages, options_in_stage, option_outlets, option_efficiencies, profit, opt_var_oc_params, operators_per_discrete_unit, yearly_cost_per_unit, capital_cost_per_unit, processing_rate, num_operators, labor_rate, discretized_purchased_equipment_cost, consider_environmental_impacts, options_environmental_impacts, epsilon, consider_byproduct_valorization, byproduct_values, byproduct_opt_conversions)[source]#
This function builds a superstructure model based on specifications from the user.
- Parameters:
obj_func (ObjectiveFunctionChoice) – Choice of objective function. Options are
ObjectiveFunctionChoice.NET_PRESENT_VALUEorObjectiveFunctionChoice.COST_OF_RECOVERY.plant_start (int) – The year that plant construction begins.
plant_lifetime (int) – The total lifetime of the plant, including plant construction. Must be at least three years.
available_feed (dict) – Total feedstock available (number of EOL products) for recycling each year.
collection_rate (float) – Collection rate for how much available feed is processed by the plant each year.
tracked_comps (list) – List of tracked components.
prod_comp_mass (dict) – Mass of tracked components per EOL product (kg / EOL product).
num_stages (int) – Number of total stages.
options_in_stage (dict) – Number of options in each stage.
option_outlets (dict) – Set of options k’ in stage j+1 connected to option k in stage j.
option_efficiencies (dict) – Tracked component retention efficiency for each option.
profit (dict) – Profit per unit of product in terms of tracked components ($/kg tracked component).
opt_var_oc_params (dict) – Variable operating cost parameters for options that are continuous. Variable operating costs are assumed to be proportional to the feed entering the option.
operators_per_discrete_unit (dict) – Number of operators needed per discrete unit for options that utilize discrete units.
yearly_cost_per_unit (dict) – Yearly operating costs per unit ($/year) for options which utilize discrete units.
capital_cost_per_unit (dict) – Cost per unit ($) for options which utilize discrete units.
processing_rate (dict) – Processing rate per unit for options that utilize discrete units. In terms of end-of-life products disassembled per year per unit (number of EOL products / year).
num_operators (dict) – Number of operators needed for each continuous option.
labor_rate (float) – Yearly wage per operator ($ / year).
discretized_purchased_equipment_cost (dict) – Discretized cost by flows entering for each continuous option ($/kg).
consider_environmental_impacts (bool) – Choice of whether or not to consider environmental impacts.
options_environmental_impacts (dict) – Environmental impacts matrix. Unit chosen indicator per unit of incoming flowrate.
epsilon (float) – Epsilon factor for generating the Pareto front.
consider_byproduct_valorization (bool) – Decide whether or not to consider the valorization of byproducts.
byproduct_values (dict) – Byproducts considered, and their value ($/kg).
byproduct_opt_conversions (dict) – Conversion factors for each byproduct for each option.
- Returns:
Pyomo superstructure model.
- Return type:
ConcreteModel
Report Superstructure Results#
Report Superstructure Results Code#
Author: Chris Laliwala
- prommis.superstructure.report_superstructure_results.report_superstructure_costing(m, results=None)[source]#
This function reports the costing results of the superstructure. This includes the objective function value, the yearly cash flows, revenues, capital expenses, and operating expenses. Relevant costing parameters are also reported.
- Parameters:
m – Pyomo model
results – Solver results object
- prommis.superstructure.report_superstructure_results.report_superstructure_environmental_impacts(m, results=None)[source]#
This function reports the yearly, and total environmental impacts produced by the process. The user must specify the superstructure model to track environmental impacts for this function to work.
- Parameters:
m – Pyomo model
results – Solver results object
- prommis.superstructure.report_superstructure_results.report_superstructure_results_overview(m, results=None)[source]#
This function reports an overview of the results of solving the superstructure. This includes the optimal pathway, the objective function value, and the total environmental impacts if the user chose to track them.
- Parameters:
m – Pyomo model
results – Solver results object
- prommis.superstructure.report_superstructure_results.report_superstructure_streams(m, results=None)[source]#
This function reports the yearly values of the flow variables within the model. This includes flows entering each stage (f), flows entering each option (f_in), and flows exiting each option (f_out). If byproduct valorization is considered, then the yearly flows of byproducts produced are also reported.
- Parameters:
m – Pyomo model
results – Solver results object
References#
Laliwala, Christopher and Ana Torres. “Recycling Rare Earth Elements from End-of-Life Electric and Hybrid Electric Vehicle Motors.” Computer Aided Chemical Engineering 53 (2024): 1309-1314.
Laliwala, Chris and Ana I. Torres. “Design and Optimization of Processes for Recovering Rare Earth Elements from End-of-Life Hard Disk Drives.” Systems & Control Transactions 3 (2024): 496-503.
Keim, Steven A. “Production of Salable Rare Earths Products from Coal and Coal Byproducts in the U.S. Using Advanced Separation Processes: Phase 1.” Technical report, Marshall Miller & Associates, Inc., 2019.
Theis, Joel. “Cost Estimation Methodology for NETL Assessments of Power Plant Performance.” Technical report, National Energy Technology Laboratory, 2021.
Ulrich, Gael D. and Palligarnai T. Vasudevan. Chemical Engineering Process Design and Economics: A Practical Guide. Durham: Process Publishing, 2004.
U.S. Bureau of Labor Statistics. “Occupational Employment and Wages, May 2023.” 2024. https://www.bls.gov/oes/current/oes518091.htm. Accessed: 2024-09-16.
EPA. “Tool for Reduction and Assessment of Chemicals and Other Environmental Impacts (TRACI).” 2024. https://www.epa.gov/chemical-research/tool-reduction-and-assessment-chemicals-and-other-environmental-impacts-traci. Accessed: 2025-10-12.